 www.webx.dk Start page
www.webx.dk Start page
 MY little Radio Control page
MY little Radio Control page

 UHF data link
telemetry
UHF data link
telemetry
Ideas for the use of this real-time high speed data downlink from RC plane to ground:
1. GPS position data, Speed, Height, + more.
2. Alarm functions, Low batt, Glow motor stopped, low Nitro level, + more.
3. Monitor functions, Voltage, Current, Temperature on EL planes, + more.
4. Score board on ground for real time battle system, who shoot who and when and how.
5. Radio signal quality and low signal early warning.
6. Plane finder with super range.
7. You imagine..
The heart of the radio chips are ready made modules called
MICRF620 from micrel
The radio chip in both ends are setup using a tiny45 microcontroller from Atmel.
Since I have a radio amateur license, I can use a legal frequency and power
amplify the transmitter up to a level of useful range of several km.
The data transmitted in this project page is GPS data from SIRF module EM406
with Sirf Star 3 chip set.
THE GPS MODULE
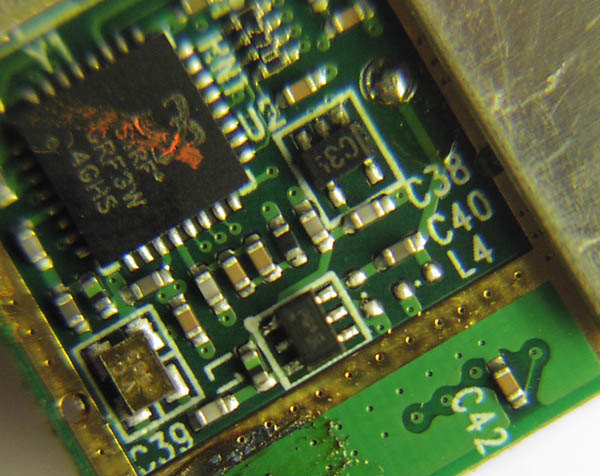
First problem : see inside the GPS module, the internal filter was left out !!
so no filtering against blocking at ANY band at all.
the telemetry link at 435MHz did block the GPS, and in such a powerful way that
something had to be done. Another close-up


The GPS module is light, only 5.5gr - The Patch antenna is made of solid
ceramics, so it is 9.2gr
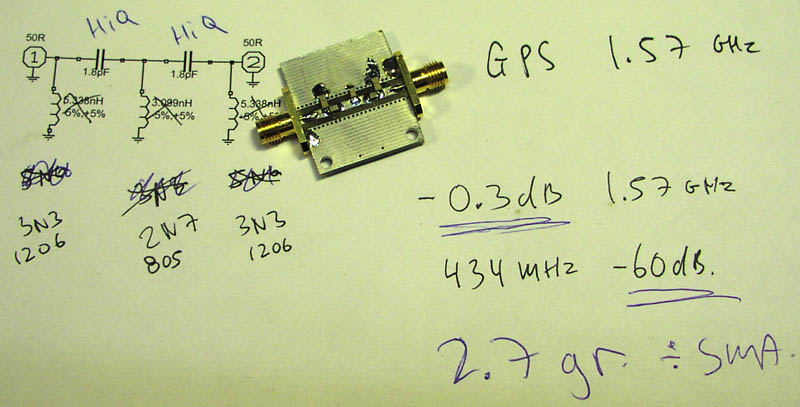
The GPS filter is a Hi-pass type, so it will transfer the GPS frequency of
1.57GHz without any attenuation,
The telemetry at 434 or 435MHz is attenuated 60dB


close-up of the filter, top and bottom side. the PCB was cut out from some old
telecom equip made for using hi frequency low loss material.

The values simulated differ slightly, the good peak is conviently placed at
1.57GHz.

After cutting the filter smaller it got down to only 1.5gr.

To avoid short-circuit some isolation is needed at the back side.

Un-needed track end removed and hole drilled.

Connection to the GPS is made.

Here the GPS module with filter mounted before closing it again.

Good grounding is important.
We tried to use a Quadrofillar GPS antenna, but the sat reading was really bad,
so we ended up mounding the patch antenna at the end on this filter top side
down.
THE 434MHz TRANSMITTER

I used an old board I had on stock with voltage regulator and footprint for an 8
pin microcontroller (Tiny45 on the other side)
the MICRF620 module is glued to the board, the dip-switch sets the transmit
channel. The orange wire is serial NMEA data input.
The MICRF620 module outputs up to 10mW of power, good for several hundred meters,
but not sufficient for km range with the antenna pointing in random positions, so
more power is needed.
THE POWER AMPLIFIER PA

I found an old hi frequency telecom board with 4 layers and super good
grounding,

I simply cut the few tracks i needed, and added the components just as on the
freescale demo board.

My own small board and the large demo board. I got exactly the same gain and
power from my own board.
THE TX LOW-PASS FILTER
(picture of filter is missing)
to prevent overtones generated in the transmitter and power amplifier and to
make sure the GPS is not jammed (blocked)
the 5 pol low pass filter was added, it gives very low loss 0.2dB at 434 MHz and 60dB
at 1.57GHz.

This filter uses much higher value components, that is why it perform exactly
like the simulated values.
THE POWER SUPPLY FOR THE TX AND GPS
(picture missing)
The PA stage run on 7V and 180mA so a small switch mode supply was added, to
minimize power loss from the battery,
and also keep heat generated at a minimum.
THE RX RECEIVER

Again
I used an old board I had on stock with voltage regulator and footprint for an 8
pin microcontroller (Tiny45 on the other side)
the MICRF620 module is glued to the board, the dip-switch sets the receive
channel. Since the MICRF620 and microcontroller, runs on 2.5V
and the serial port converter RS-232 runs on 5V another similar board was added,
(picture missing)
this one is cut smaller and adjusted to 5V. now this RX section will run fine
from 5V to 20V input.
TEST FLIGHT
not done yet... we will be back..
Thomas Scherrer - OZ2CPU - Feb 2007
{kind=link}