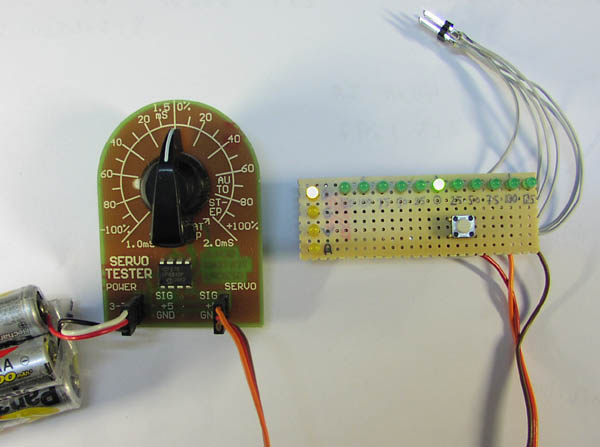
The prototype analyzer here together with my servo tester. the 6 pin connector and gray wires are for programming and debugging.
The prototype analyzer
here together with my servo tester. the 6
pin connector and gray wires are for programming and debugging.
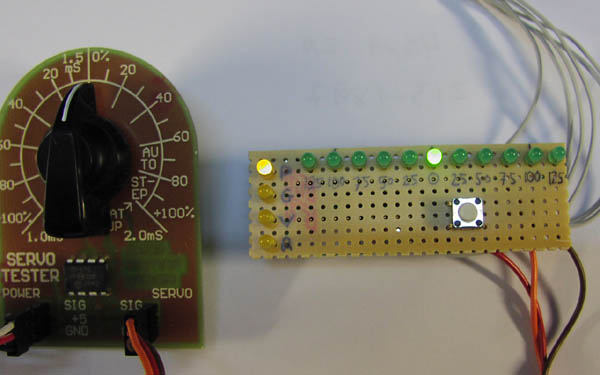
In Pulse mode each Green LED
indicate the servo pulse width according to the 1.5mS centre standard:
-125% -100% -75% -50% -25% 0 +25%
+50% +75% +100% +125%
In Glitch mode each Green LED indicate how many glitches where detected since
last power up/reset:
10k 1k 500 100 50 20
10 5 2 1 0
In Voltmeter mode each Green LED indicate the servo voltage supply:
4.2V 4.4V 4.6V 4.8V 5.0V 5.2V 5.4V 5.6V
5.8V 6.0V 6.2V
In Ampere meter mode each Green LED indicate the current usage flowing through
this unit:
100mA 200mA 300mA 400mA 500mA 600mA 700mA
800mA 900mA 1000mA 1100mA
The voltage meter has a lower peak hold of 1 sec, to reveal bad power source.
The Ampere meter has a max current peak hold of 1 sec, to reveal max servo
usage.
The mode select button, simply
pres to change mode.
when in glitch mode, hold button in more than 0.8sec to reset counted glitches.
The normal servo pulses are centred at 1.500mS, this scheme show the corresponding
LED readout in pulse mode:
Centre value uSec. Readout%, min-max pulse to lit LED:
2125 125% 2063-2187
2000 100% 1938-2062
1875 75% 1813-1937
1750 50% 1688-1812
1625 25% 1563-1687
1500 0% 1438-1562
1375 –25% 1313-1437
1250 –50% 1188-1312
1125 –75% 1063-1187
1000 –100% 938-1062
875 -125% 813-937
If a pulse is over 2187uS the
+125% LED will blink, and add one to the glitch value,
If a pulse is under 813uS the -125% LED will blink, and add one to the glitch
value.
Some RC systems use 1.6mS for the centre value, in this case you can calibrate
the centre value you want to use.
Calibrate new centre value:
Apply wanted centre pulse width ! then hold the button in, while powering up,
after 1 sec the centre LED will blink 5 times, if ok, after that normal operation
mode.
Note: To be able to enter the store calibration mode, the input pulse must be
stable within 1% and within 1400uS to 1700uS.
Usage:
1. Test every servo is working fine, no mechanical stress or too hard loaded.
2. Test all servos, voltage and current, plug it - in between power and your RX,
then you can not see any pulses-
but the total current and voltage under stress, move all sticks fast at the same
time, and check no voltage drops,
good to reveal a potential weak battery pack.
3. Leave it in your plane, after landing see if you had glitches and how many.
4. See stored max current and min volt peaks, if this mode is turned on.
Voltage and Current peak storing:
connect at wire on the PCB from pad A to pad B,
now the voltage meter will only read out the min peak voltage,
and the ampere meter will only read out the max peak current,
the reset peaks works exactly as the glitch reset, at right mode, hold the
button for over 0.8sec.
Serial port:
the RS232 port is available for a later software upgrade,
with this you will be able to log pulses, voltages, and currents while flying
and then later transfer it all to a PC,
the voltage and current meter can be modified to be used on main motor packs if
needed.

close up of proto type, P=Pulse, G=Glitch, V=Volt, A=Ampere
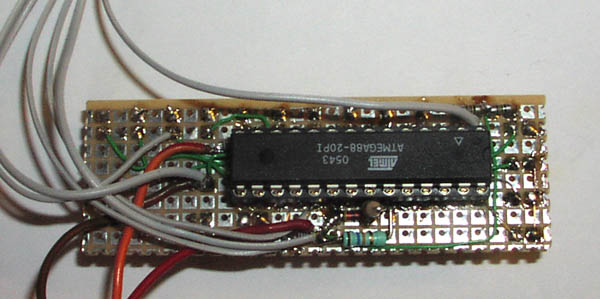
Note on the bottom side there is not really many components.
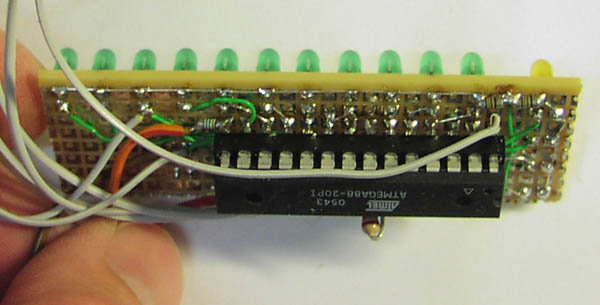
I was carefull when soldering all the LED's in nice straight.
proto0026.avi little avi
proto0027.avi little avi
proto0028.avi little avi
Done by Thomas Scherrer OZ2CPU April 2006